Prototyping Ideas for an Interactive Robot Arm
Client
- Triad Berlin mbH
Team
- 1 Illustrator
- 1 Video Artist
Year
- 2016
Tasks
- Analysis
- Concept
- Implementation
How can we use an industrial-grade robot arm in exhibitions?
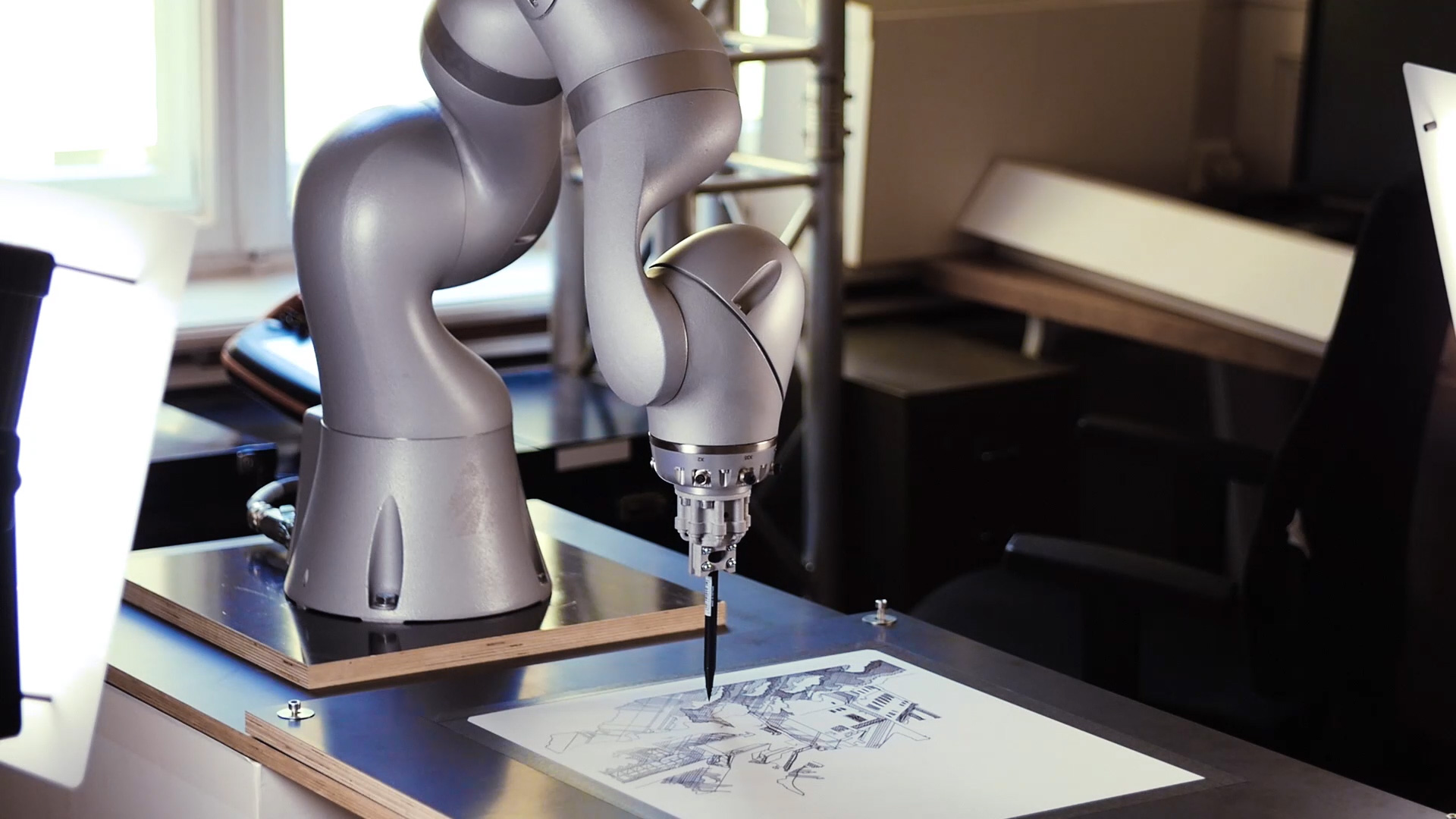
During my internship at TRIAD Berlin mbH, my task was to come up with solutions for how to integrate an industrial grade robot arm into future exhibitions or trade fairs. Up until then, TRIAD used the robot arm mainly in a non-interactive way. For example, in one installation, we mounted a monitor on the robot which showed context-specific information about exhibits. The robot would then transport the monitor to the respective exhibits in pre-defined, articulate paths.
I prototyped three different applications in a short timespan, one of which reached a production level.
The robot is drawing the Wartburg in Thuringia as an advertisement for the opening of the 360 Grad Thüringen exhibition in Erfurt, Germany.
Results
I prototyped three different applications in a short timespan, one of which reached a production level.
Link The Robot to a Microsoft Kinect
To get familiar with the robot and its capabilities, I created a link between a Microsoft Kinect Tracking system, which tracks persons in a room, and the robot. This allowed the robot to follow the movements of a visitor. While the system worked, the robot automatically calculated how to reach that position, ignoring possible obstacles (such as visitors), which would be unsafe in an exhibition context.
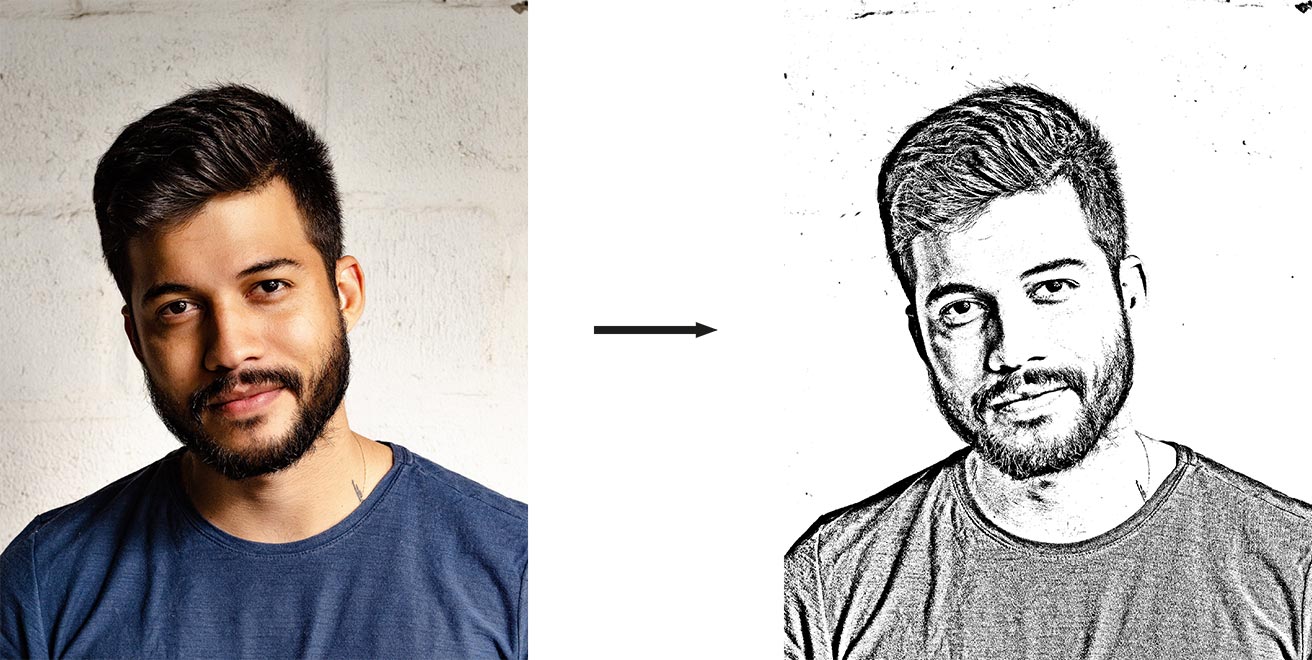
Make The Robot Draw Any Kind of Image
Then, I designed and implemented a drawing application for the robot. For this, I implemented a Processing application that converted any kind of photo into a silhouette vector graphic. This vector graphic was then processed again in an application written in the robot-specific programming language – deriving a set of movement commands for the robot arm.
Export Paths from Cinema 4D to The Robot
My third idea was to support TRIAD in setting up the robot. TRIAD reserved large time spans for setting up the robot in exhibitions as all paths of the robot had to be manually programmed in by hand with a lot of trial and error. This, of course, is costly. However, TRIAD always built 3D models of their planned exhibitions beforehand, both for design purposes and to share their vision with the client. Therefore, my idea was to place the robot model into that 3D scene and animate the robot’s movement paths in Cinema 4D. Then, these paths could be export directly to the robot, effectively eliminating all setup work and allowing the designers to create and share the paths to the client before the actual exhibition. While I could test small functioning prototypes, I unfortunately was not able to test it in larger setting before my internship ended.
Process
Using the example of the robot drawing application, I’ll show my process in this project. I carried this project out from start to finish, beginning with research and concept, continuing with prototyping and ending with the final product.
Research
I was completely unfamiliar both with robot programming and their capabilities. Consequently, in this project, I initially researched on how robots had been used in prior exhibitions and at the same time, got familiar with the robot-specific programming language, a Java derivative.
Concept
Thinking about novel ways to use the robot arm for an interactive installation, I came up with the idea to let the robot paint portrait photos made of exhibition or trade fair visitors.
The goal: Let the robot take a photo of the visitor and draw it in black and white.
Prototyping
Using Processing, I created quick prototype sketches to test the idea’s feasibility. Although the concept worked, the robot was too slow in drawing more complex shapes.
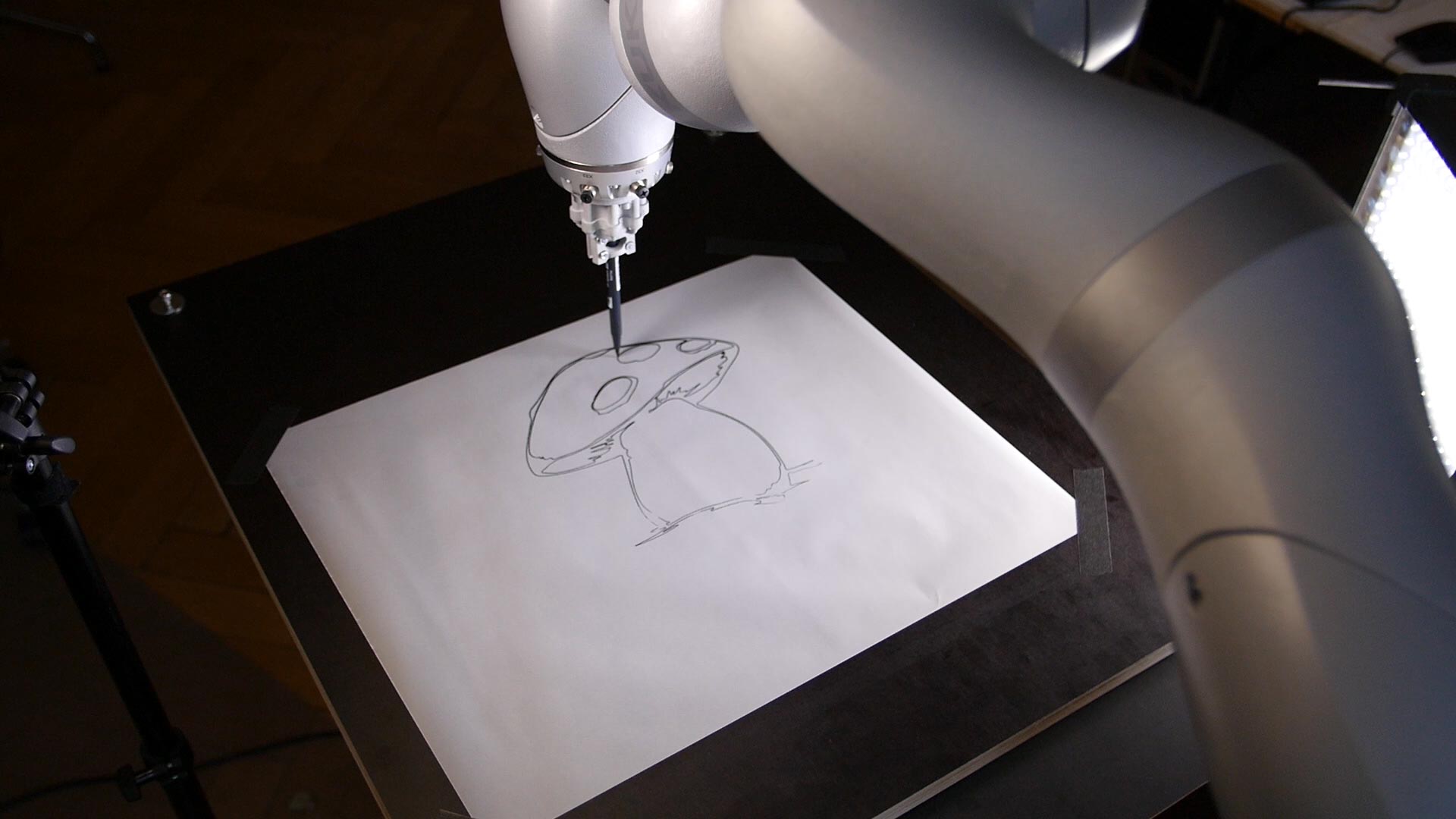
This was as fast as the robot could go without damaging the pen or losing image quality.
Production
Therefore, we used the robot as a sort of advertisement for an exhibition, where the robot would be used in a different way. For this, I collaborated with an illustrator, who created a drawing of the Wartburg, which the robot then drew.
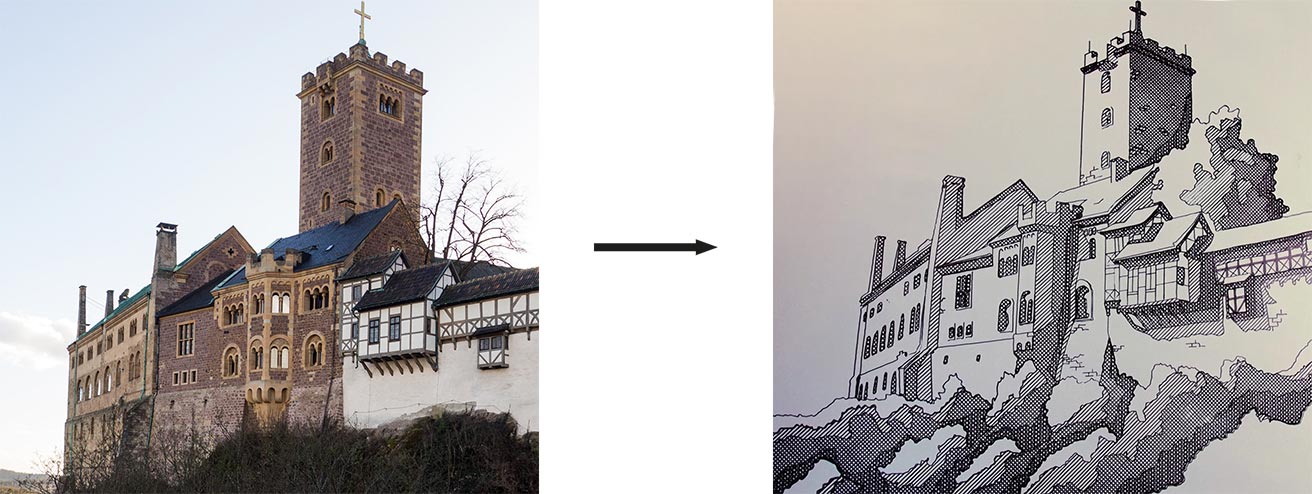
The result: A beautiful rendering of the Wartburg using only the contours and diagonal lines for hatching.
Used Tools
Below, you’ll find a non-extensive list of tools I used in this project.
Hardware
KUKA LBR iiwa 7, Microsoft Kinect 2, Lots of Pens and Paper
Software
Maxon Cinema 4D, Adobe Illustrator, Processing, vvvv
Languages
vvvv, Processing, Java